Chapter 3 - Optimal Flows (Julia Code)#
Bellman’s Method#
Here we demonstrate solving a shortest path problem using Bellman’s method.
Our first step is to set up the cost function, which we store as an array
called c. Note that we set c[i, j] = Inf when no edge exists from i to
j.
c = fill(Inf, (7, 7))
c[1, 2], c[1, 3], c[1, 4] = 1, 5, 3
c[2, 4], c[2, 5] = 9, 6
c[3, 6] = 2
c[4, 6] = 4
c[5, 7] = 4
c[6, 7] = 1
c[7, 7] = 0
Next we define the Bellman operator.
function T(q)
Tq = similar(q)
n = length(q)
for x in 1:n
Tq[x] = minimum(c[x, :] + q[:])
end
return Tq
end
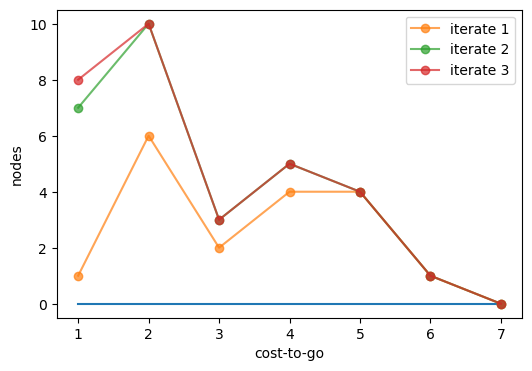
Now we arbitrarily set \(q \equiv 0\), generate the sequence of iterates \(T_q\), \(T^2_q\), \(T^3_q\) and plot them. By \(T^3_q\) has already converged on \(q^∗\).
using PyPlot
export_figures = false
fig, ax = plt.subplots(figsize=(6, 4))
n = 7
q = zeros(n)
ax.plot(1:n, q)
ax.set_xlabel("cost-to-go")
ax.set_ylabel("nodes")
for i in 1:3
new_q = T(q)
ax.plot(1:n, new_q, "-o", alpha=0.7, label="iterate $i")
q = new_q
end
ax.legend()
if export_figures == true
plt.savefig("figures/shortest_path_iter_1.pdf")
end
Linear programming#
When solving linear programs, one option is to use a domain specific modeling
language to set out the objective and constraints in the optimization problem.
Here we demonstrate the Julia package JuMP.
using JuMP
using GLPK
We create our model object and select our solver.
m = Model()
set_optimizer(m, GLPK.Optimizer)
Now we add variables, constraints and an objective to our model.
@variable(m, q1 >= 0)
@variable(m, q2 >= 0)
@constraint(m, 2q1 + 5q2 <= 30)
@constraint(m, 4q1 + 2q2 <= 20)
@objective(m, Max, 3q1 + 4q2)
Finally we solve our linear program.
optimize!(m)
println(value.(q1))
println(value.(q2))
2.5
5.0